![]()
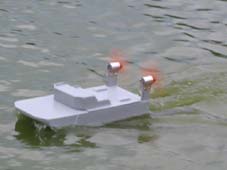
エアボート マークIIです
昨年のエアボート(マークI)の高い重心位置による不安定さを反省して
2モーター小径プロペラによる低い重心位置と、軽量な船体を目指しました。
長い距離が必要ですが、滑走状態に出来ました
 |
 |
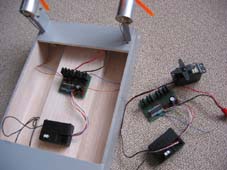 |
フレームを使わない、バルサ製の軽量な船体 サーボモータは使いませんので 船体内の受信機と制御回路だけという シンプルな構成です。 あとは走航用のバッテリーだけです。 |
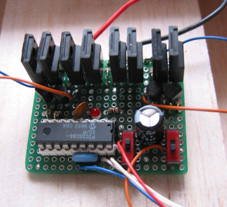 |
自作モーター制御回路 RC戦車のように左右のモーターの パワーを制御して旋回します PICワンチップマイコンで受信機の 出力からモーターの制御PWM 信号を得ています。 (この画像のあとで、パスコンが 増えています。) |
 |
モーターはGWSの300Cダイレクトを 2セット使いました。 このモーターは進角がついていないようで、 電源の極性を反転させて、容易に プッシャー式に出来ます。 |
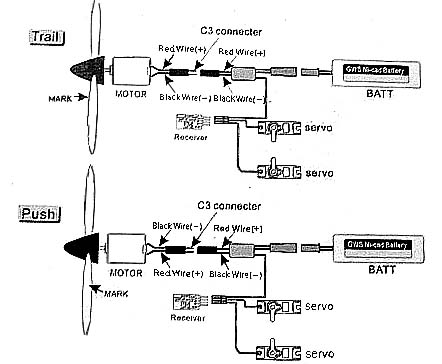 モーターセットの裏面の説明書き |
|
1 2