![]()
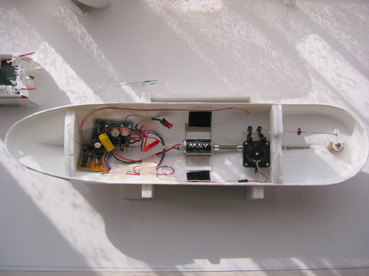
船体内部のメカの配置です
 |
今回、RCメカを提供していただいた タイヨー(太陽工業)のRCバイク 仮面ライダー龍騎 疾風の翼 ダークレイダーさんです。 後輪ホイール内部に、ジャイロがあり、ギア比を使って 後輪よりも内部ジャイロが高速回転するしくみになっています。 走らせてみると、うまく二輪で走行します。 |
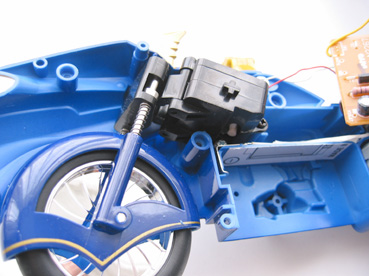 |
さすがに二輪のフォルムを崩さないように、 ステアリングアクチュエーターや回路基板はコンパクトに 作られています。 ただし、二輪なので、バック走行は出来ません 送信機のスティックを手前に引くと、電磁ブレーキがかかる しくみになっています。 |
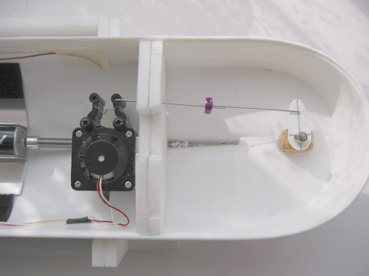 |
スチロールの板で、前後に2箇所の隔壁を作ってあります ラダーのアクチュエータはこの後部隔壁に取り付けてあります。 (これより後ろは、後部甲板の作業船を載せるために 船体内部が圧迫されていて、取り付けられませんでした。) |
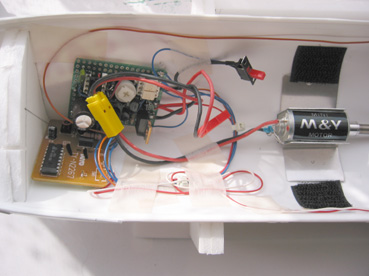 |
動力モーターはABCホビーの180タイプです アルミ板を使って両面テープで留めてあります スクリュープロペラは模型用の3枚ペラの「小」です スプリングジョイントはPower'sレインボープロダクツ。 |
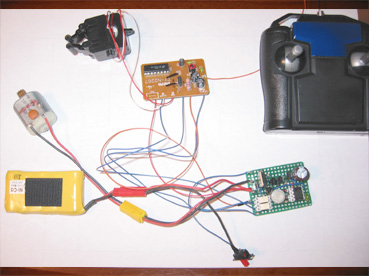 |
モーターコントロール回路は、怪しいものを作ってしまいました 元の回路基板の電磁ブレーキ動作は不要でしたので、 そのときに中間速度の前進を実現しました |
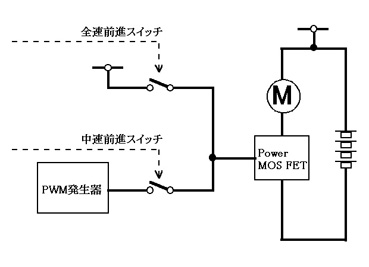 |
左は、作成したモーターコントロール回路の構成図です。 モーターへの供給電力はパワーMOSFETでスイッチングします。 パワーMOSFETのゲートには2つの入力信号を設けました。 実際の回路ではオープンコレクタのワイヤードORです。 ひとつは全速前進のハイ信号 もうひとつは中速前進のハイローを繰り返すPWM信号です。 PWM信号はタイマーIC555を使用した回路です デューティ比を可変する半固定抵抗器を付けてあり、中間速度を 調整することが出来ます。 2つの動作の切り替えは、 受信機回路基板から、必要な信号を取り出して フォトカプラで受けて使用しています。 |
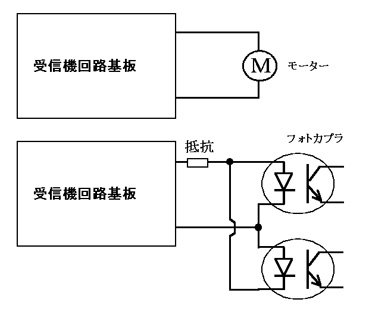 |
話が少し横道にそれますが、 前進、後進出来るラジコンの受信機回路基板の モーター駆動信号線を使って、フォトカプラを駆動する場合 この配線が合っています。 |
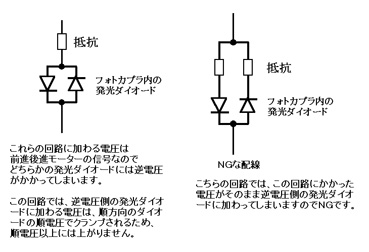 |
発光ダイオードは整流用ダイオードとは異なり 逆電圧に非常に弱いものです。 スペックシートを読むと、逆電圧は5V程度であると 記載があります。 左図の2つの回路は似ていますが、 左の回路が正しく、右の回路ではフォトカプラの 発光ダイオードを壊してしまう可能性があります。 |
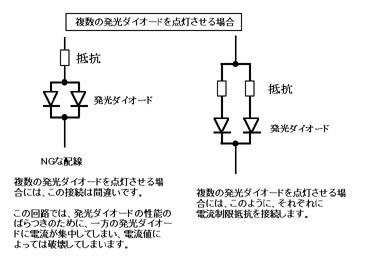 |
ちなみに、見た目は似た感じの回路ですが 複数の発光ダイオードを点灯させる場合には それぞれの発光ダイオードに抵抗を接続します。 抵抗を1本にまとめた左の回路は間違いです。 |