コレクティヴ製作 ・ クオドラント改修 ・
MCPコントロールBOX製作

FSを楽しんでいると、どうしても操縦装置を追加や手直ししたくなります。 5年前には思い切ってセスナ用ミニコックピットを作成しましたが、ヘリコプター用、ジェットライナー用の装置もやはり欲しくなり、かと
言って購入するのもコストがかかるので、自作を決意し少しずつやってみることになりました。
ここではヘリコプターのコレクティヴ、クオッドラントの改修、B737用のMCPコントロールBOXの製作結果について
ご紹介します。
コレクティヴ Ver.1の製作

先ずは市販のジョイパッドの中に入っている制御基盤を利用して、コレクティヴを作成することにしました。
パーツは電機配線用の分岐ボックス、鉄パイプ、スイッチといったところです。
動きを検知するセンサーは、赤外線距離センサーを使ってみることにしました。
可変抵抗(ボリウム)を使うのが簡単なのですが、経年変化でガリってしまいメンテナンスが必要になることも多いので、センサーの使い勝手を試してみるつもりで取
りかかりました。
センサーは制御基板の電圧と同じ5Vで動作しますので、この点でも扱いやすいものです。
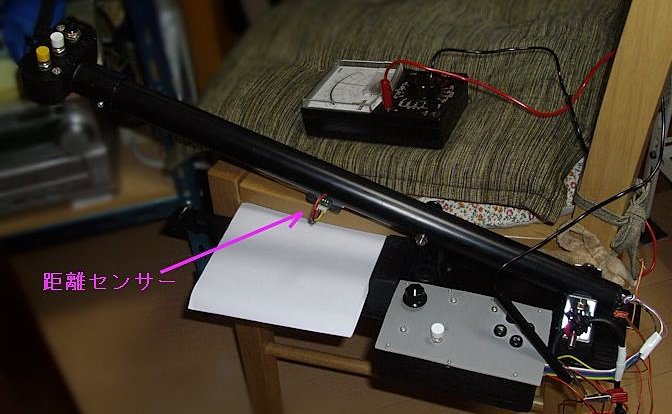
鉄パイプの真ん中あたりに赤外線距離センサーを取り付けて、出力電圧をチェックしてみました。
しかし反射用素材からの距離が10cm以下になると、どうも検知量(変化量)が僅かになってしまい使いづらい感じです。
また、パイプの真ん中の位置ではセンサー自体の動きが少なくなってしまって検出量の変化も大きくないので、どうもこれは取り付け位置を先端の方にもっていかなけ
ればならないようです。
しかし、パイプを長くした使い勝手で工作してしまいましたので、この製作では距離センサーの使用を諦めました。

最終的にはこの回の製作では可変抵抗器(ボリウム)を使いました。
ボリウムにゴムローラーを取り付け、コレクティヴレバーに付けた細板を接触させてボリウムを動かすという算段です。
動作的には問題なく動きましたが、最大の欠点はゴムローラーと細板が「滑る」ことです。この滑りのため時々位
置合わせが必要になりました。
コレクティヴ Ver.2の製作


Ver.1を作成後にFS製作界の神様ともいえるBackyさんから専用の制御基板を送っていただきました。
分解能12ビット! 通常のジョイパッド基板は8〜10ビットの物がほとんどですの
で、数倍〜20倍の分解能の優れもの基板です。
さっそくVer.2の製作にとりかかることになり、パイプは軽いアルミ製のものに変更し長さも少し短くしました。
そして今回こそは赤外線距離センサーを使ってみることにしました。
先端部のスイッチBOXも違う形の配電BOXを探してきて、この中に赤外線距離センサーを埋め込む事にしました。
パイプの軸受けの構造も簡単な形にしました。パーツはパイプ以外全て屋内配電用のパーツです。

コレクティヴの全体を組み上げて、距離センサーの状態をテストします。スイッチBOXの中にセンサーが仕込んであります。
赤外線反射板にはやはり「白」が良いようで、見た目にはちょっとよろしくないのですが、取り外し可能な形で反射板をつけてあります。
コレクティヴレバーの動きと出力電圧の変化量もほぼ狙った感じになっていますので、Backyさんの基板を取り付けて最終調整に入ります。
Backyさんからは新たに追加のスーパー基板をいただいていて、そちらの調整も必
要です。
「スーパー」というのは、先の12ビット制御基板に加え、センサーの出力電圧幅を12ビット基板の入力電圧幅と合致させる機能(マイコン制御の計装アンプ)基
板、という訳で、とてつもなく高機能の検知機能を持つものが作れます。
調整は少し時間がかかりましたが、ほぼBackyさんの設計通りに調整出来たと思いましたので、コレクティヴとしての仕上げに入りました。
基板を取り付け、埃除けのために薄いアクリル板でカバーを作って被せました。
コレクティヴレバーの握り部分が冷たい、また夏場は汗が付くので、対策用にそれらしいパーツを探していたら硬スポンジ製の配管カバーを見つけましたので取り付け
ました。
見た目もVer.1よりはスマートに仕上がったのではないかと思います。
使い勝手も悪くありません。コレクティヴレバーが僅かに振動してもヘリのパワー計の針がプルプルするほどの高感度です。
プルプルしてもヘリの挙動には影響していません。
改善点としては、レバー軸受けの部分の動きがもっと「スムーズ且つ硬く」といった矛
盾する性能を持つ事です。
レバーを止めた位置でピタッと静止し、簡単には動かないこと。
見通しは立っていませんが、硬く且つスムーズにするためには、何か「重い」パーツが要るように感じます。


クオドラントの改修
 Saitekのクオッドラントを使っていて、標準付属の固定器具ではどうもクオッドラント本体も少し動いてしまって固定感が今ひとつでした。そんな折、ひとつの
クオッドラントのボリウムがガリってしまい使いにくくなったので、中身のボリウムを取り替えるついでに改修と追加を行うことにしました。
Saitekのクオッドラントを使っていて、標準付属の固定器具ではどうもクオッドラント本体も少し動いてしまって固定感が今ひとつでした。そんな折、ひとつの
クオッドラントのボリウムがガリってしまい使いにくくなったので、中身のボリウムを取り替えるついでに改修と追加を行うことにしました。
取り替えたボリウムとSaitekの制御基板の相性が悪かったので、思い切って取り外し、市販のジョイパッド制御基板BU0836を
使って、ついでに追加の回転軸とスイッチを付けました。
エレベータートリム軸とランディングギアレバーを追加し、木で筐体を作って全体を納めましたが、使い勝手はとてもよくなりました。スロットルレバーをうごかして
も筐体が動いてしまうこともありません。
それから、6本のレバーもすべて同じ長さでは使いにくいし見た目も寂しいので、スポイラ、スロットル、フラップ用のレバーは元々のプラスチックつまみを一部利用
しながら、木や紙粘土で仕上げてみました。
MCP制御ボックスの製作 (
Feb. 2020 )
 ジェットライナーをそれらしく飛ばすには自動操縦機能の使用が欠かせません。
ジェットライナーをそれらしく飛ばすには自動操縦機能の使用が欠かせません。
初めのうちは、すべてマニュアルで飛ばせなくては面白くない、という訳で練習するのですが、高度、スピード、コース等々なかなか安定して飛ばせるようにはなら
ず、かと言ってオートパイロットを使用するにも、シム画面のMCPをカチカチとクリックするのも面倒で、特にランディング直前になるとランウエイから目を離してマ
ウスクリックしているうちに、機体は制御不能の状態にまで動いてしまうことになります。
やはり「それらしい飛行」をするにはMCPが必須なのですが、これが高価で手が出ません。安い物でも6万前後します。なんとか自作したいと長年考えていたのです
が、この1、2年に試していたマイコンのArduinoの仲間にArduinoLeonardoと
いうのがあって、これを使うとキーボードのエミュレーターを組めることが分かりました。マイコンで各スイッチやロータリーエンコーダの増減信号をキーボード
代わりに送り込もうという狙いです。
Arduinoの互換品なら千円〜2千円で買え、他のロータリーエンコーダー類も今は随分と安いものが入手できる(実はまだ少し高いときに購入していた手持ちが
ある....)ので、一念発起、思い切って製作する事になりました。
筐体はアルミ製を買うと高価なので、木製の手作りにします。また、キーボードエミュレーターとして信号を送り込むぐらいしか今の私の力ではプログラミング出来ま
せんので、7セグメントのLEDによる数値表示はあきらめて(シム画面の数値を見ればよい)、MCPのつまみとスイッチ機能を実現させた「MCPもどき」と
して製作することにしました。


回路もプログラミングも決まっていないのに、とにかくMCPとして必要なものをBOXに取り付けます。
Arduinoの性能の関係で、全てをロータリエンコーダーとスイッチでまかなうにはピン数が足りないので、一部機能はボリウムを使って数値変化をスイッチ信号
になるようにプログラムします。
また、MCP機能に加えオートブレーキも付け、さらに何にでも割当て可能なAUXスイッチを1個付けることにしました。
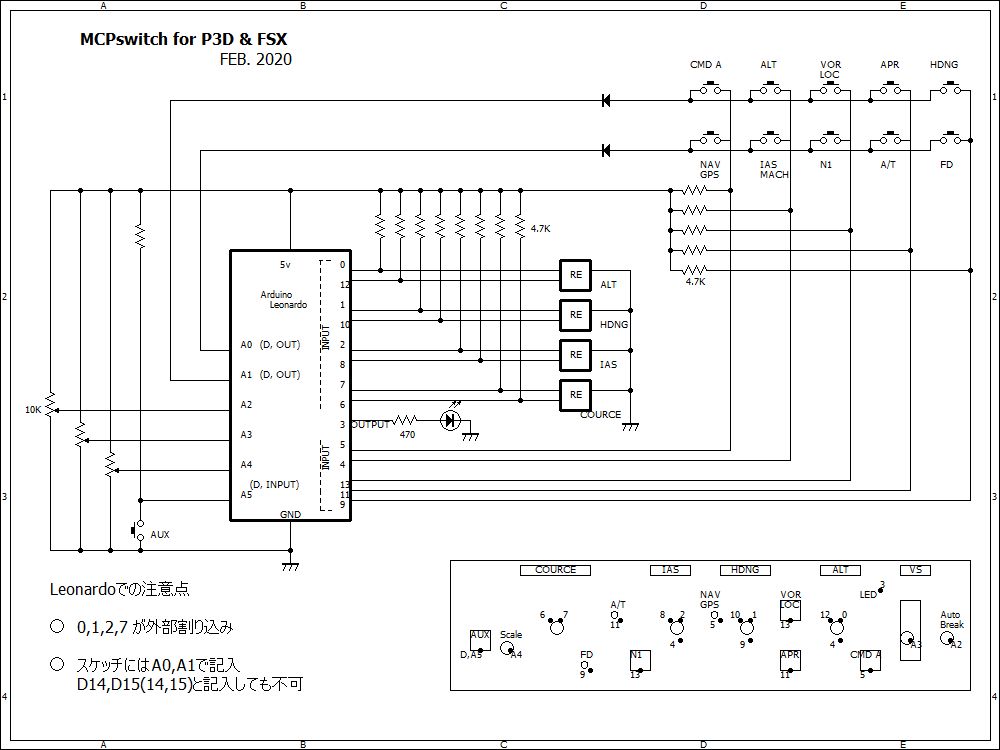
回路はこんな感じです。 今回もBackyさんに沢山のアドバイスをいただきましたm(_ _)m
11個のスイッチの内10個は5x2のマトリックス回路です。
Arduinoはソフトウエアでプルアップ出来るのですが、間違いや勘違いでArduino本体を壊してしまわないため、見た目でも確認できるように抵抗を付け
ました。
3番ピンのLEDは、バーチカルスピード(VS)を設定しているボリウムの中点位置を指示するためのものです。できればVS設定はロータリーエンコーダにしたい
ところです。
ボリウムで制御する機能を1個あきらめればピンが1本余るので、ロータリーエンコーダに変更することは可能です。
回路が決まったら先ずはブレッドボードで配線し、プログラムと併せて上手く行くかどうかチェックです。この段階で何回もプログラムを直しました。ここでも
Backyさんのアドバイスをたくさんいただきました。
最大のポイントはスイッチやエンコーダーのチャタリング対策と、それに絡んでのタイミング調整でした。エンコーダーの処理はスピードを要するのに、スイッチの処
理は僅かに遅れ時間を取らないと上手くいかない、という対立点を処理しないといけないので、プログラムは2系統に分け
て考え、エンコーダーが動いたのを検出したらスイッチ検出をやらないようにして対処しました。
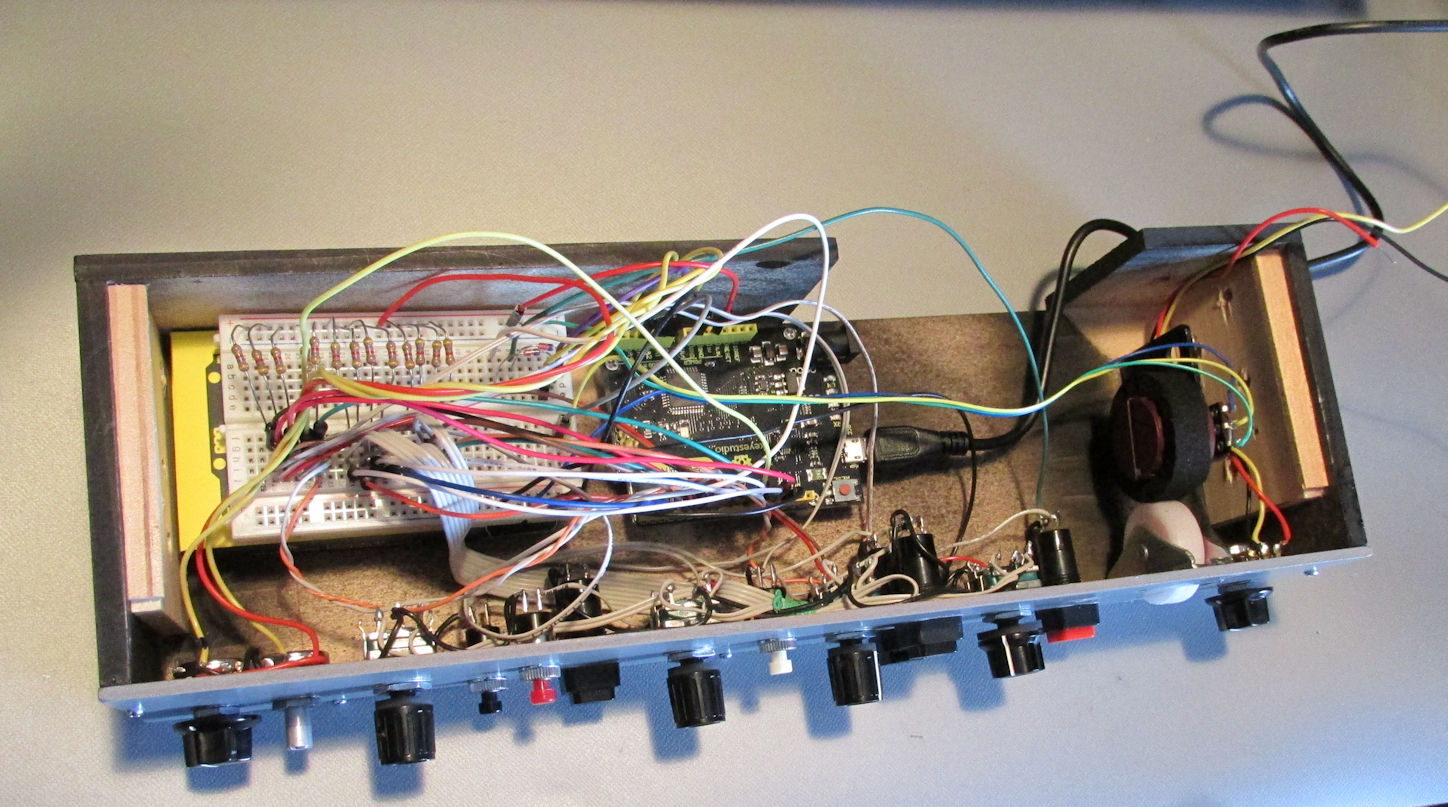
配線自体はICピッチのユニバーサル基板で行い、最終的にはArduino
にシールドする(覆い被せる)形にしましたが、Arduinoのデジタルピン群の配置位置が少しずれていて基板の穴にぴったり合わないので、基板を切って位置合わせをして
また接着するという力業でシールド用基板にしました。
製作していると思わぬ事態に遭遇するものですね。
Leonardo用の純正シールドがあれば楽だったのですが、純正シールドは意外に高いように思ったので探しませんでした.....
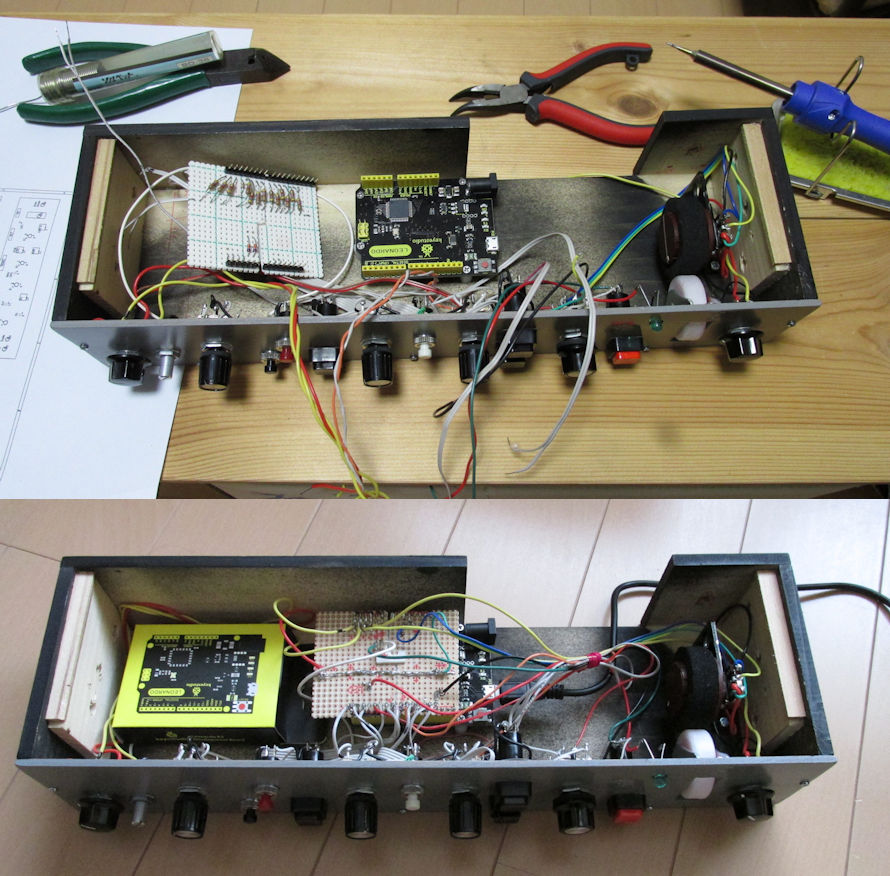
VSの縦型のノブは戸車とボリウムで実現しています。ボリウムに大きめのつまみをつけて、それに硬スポンジの筒(コレクティヴに使った物がぴったり合った!)を
はめて戸車と接触させました。
できれば戸車の縁をギザギザに加工するとよかったかなと思います。
製作開始してから1ヶ月でようやく完成しました。見た目は市販品に遠く及びませんが、以前から着想していたことが実際の形として実現し、またArduinoにつ
いても機能をフル活用できたので、自分なりに満足の出来る製作となりました。気にしていた製作費ですが、今現在、部品を新調して作ったとしても1万円以内で出来る
はずです。
最後に、Backyさんにはたくさんのご教示をいただきましたこと、改めて御礼申し上げます。
ホ−ムページに戻る(Go
to HOMEpage)