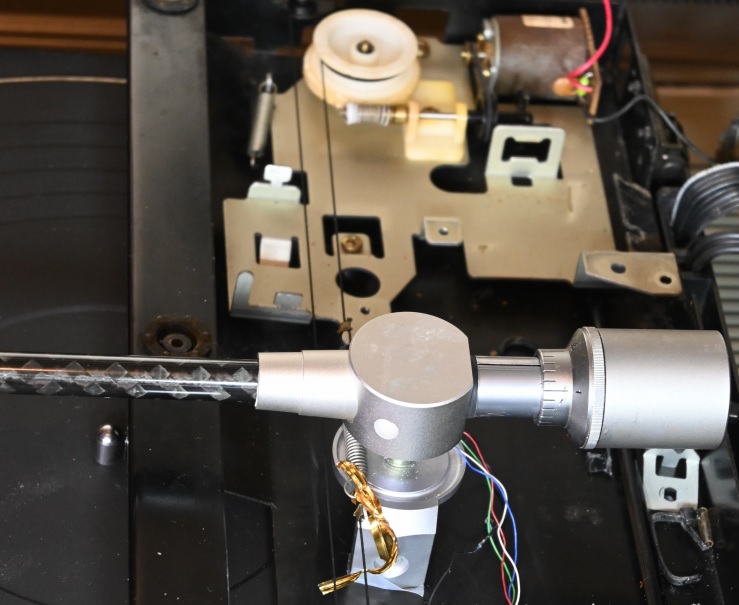
前ページのアームにコネクタを付けて」音出ししました。
2022.11.21
前ページのアームにコネクタを付けて」音出ししました。
2022.11.21
安定した音が出ています。
音は悪くありません。
鳴らしている途中でアームの基台を動かしてみました。
ふらつかずに移動でき、音もおかしくなりませんでした。
ピンポイントサポートが良いのはもう判っていますので、このアームでリニアトラッキングを試すことにしました。
再びメーカー製のリニアトラッキングプレーヤーを入手しました。
KENWOODのミニサイズのプレーヤー(部品取り用)を入手しました。
 これをばらしてリニアトラッキングの駆動部分を利用するわけです。
これをばらしてリニアトラッキングの駆動部分を利用するわけです。
さてどうなるでしょうか?
これを改造して原理確認(手で動かすのが1回目、これが2回目)をします。
アームの基台にはテフロンテープを貼っています。
モーターを回すとスムーズに移動します。
もちろんアームは変な動きをしません。
原理的にはこれで良さそうです。
モーター式のリニアトラッキングはアームに少し角度が付くとモーターを動かし、適正な角度になると停止を繰り返します。
これと同じことはしたくなく、一定の速度でとまらずに動かしたいと思っています。
動きが少し早くても、少し遅くてもアーム長がありますので何の問題もありません。
平均的な一定時間で動かせば良いと思います。
溝の多さをみて、長時間、中時間、小時間と3切替え位があればなお良いと思います。
現状の減速機構では減速が足らずスピードが早すぎです。
モーターはDCモーターですので、電圧を下げれば回転スピードは遅くなりますが、トルクが下がってとまってしまいます。
ステッピングを行うようにモーターを駆動すればスピードは遅くなるので、簡易的にはこれかなと思います。
もしくは大きく角度が付いたときに連続的にモーターを動かすのが良いと思います。
今後検討したいと思います。
以上、ピュアストレートアームの制作、ページ5でした。
(リニアトラッキングアームその2の制作、ページ1)
このページの文章、写真、図面、データ等を他に流用しないで下さい。
内容のみお使い下さい。


 前のページへ
前のページへ 次のページへ
次のページへ