実際に駆動して音出ししてみました。
2022.11.30
実際に駆動して音出ししてみました。
2022.11.30
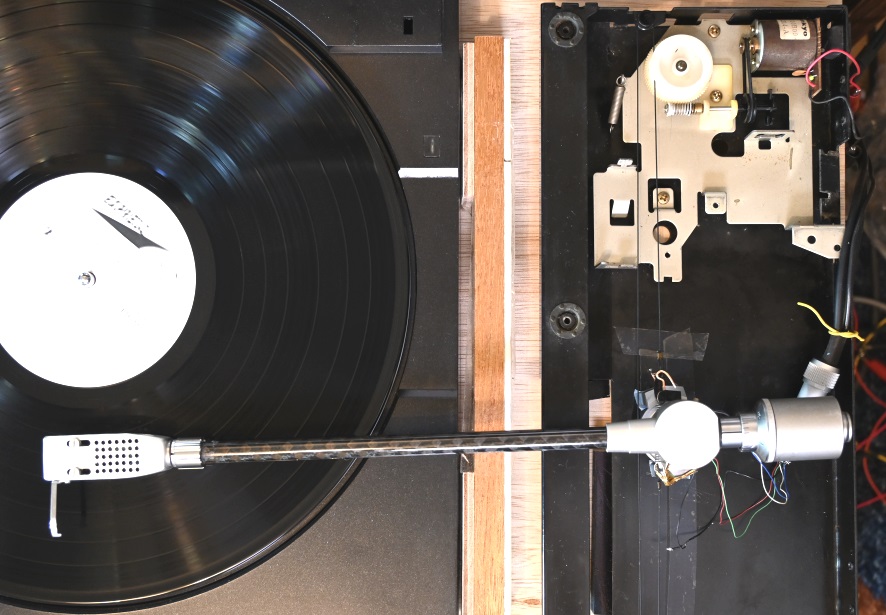
色々問題はありましたが、音は出ました。
元のリニアトラッキングメカは動かすスピードが速くこのままでは使えません。
このメカをそのまま生かすには、99秒停止、1秒動作とするのが良さそうな感じです。
タイマーIC、555を使って発振回路を作りました。
約50秒停止、0.5秒動作としました。
それで音出ししてみました。
ちょっと早すぎます、途中で止めないとならない移動速度でした。
アームの起動時に軽いショック音が出ます。
移動開始時のショック音を解決するにはやはりもっとスピードを下げて常にゆっくりと動かすようにするのがベターです。
又、モーターはシャーシにネジで強固に取り付けられておりこれを浮かさないとおそらく回転音も出ているかと思います。
モーターをシャーシから離して、ゴムベルトを長くして起動時にたわむようにすれば少しは良くなると思います。。
今後はその方向でまずは検討したいと思います。
以上、ピュアストレートアームの制作、ページ6でした。
(リニアトラッキングアームその2というかハイブリッドアームの制作、ページ2)
このページの文章、写真、図面、データ等を他に流用しないで下さい。
内容のみお使い下さい。


 前のページへ
前のページへ 次のページへ
次のページへ