さらにその後の検討結果です。
2022.12.5
さらにその後の検討結果です。
2022.12.5
アームをゆっくり動かすためにタミヤのギアードモーターとプーリーを買いました。
ギアードモーターはおよそ200分の1の減速比としました。
それだけでは足りずにプーリ―を大きいものに交換しました。
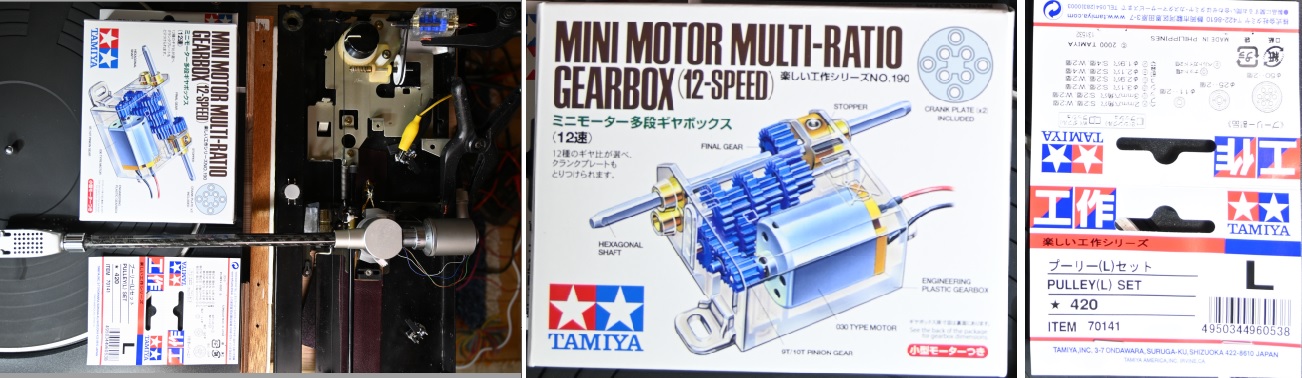
このモーターは3V定格なのですが、1.5Vから2V位にスピードを落としてちょうど良い感じです。
ギアの音はうるさいのですが、針では拾っていないので何かを被せて良しにしようかと思っています。
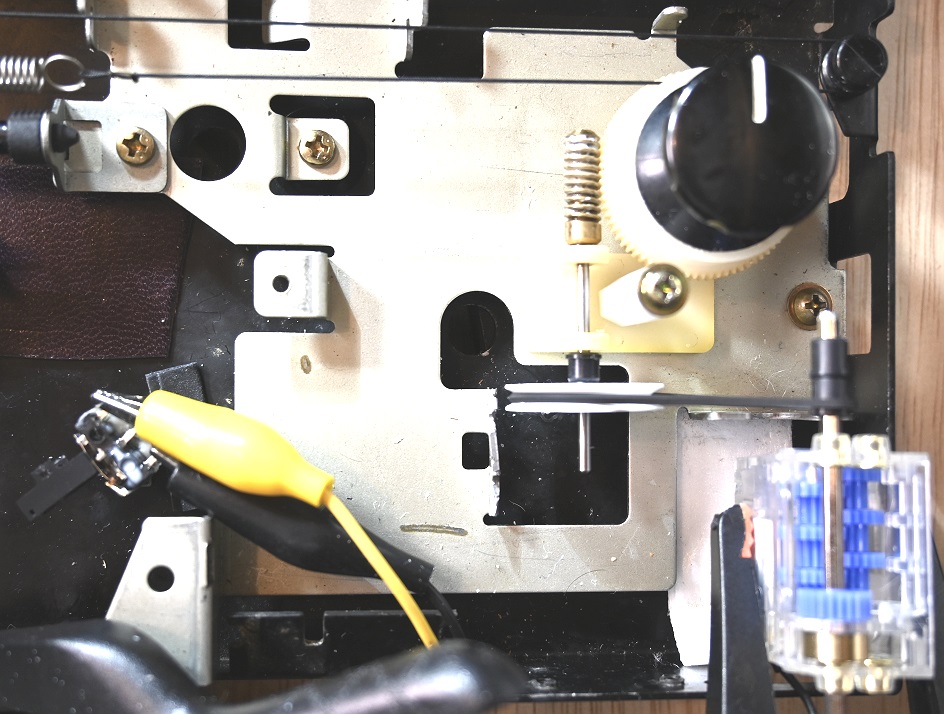
問題は、モーターを逆転してアームを開始位置に戻そうとしても回転が遅く時間がかかってしまい実用になりません。
仕方ないので、途中のギアを外し、ワイヤーを駆動する最終プーリーを手で回して元に戻すことにしました。
黄色いワニ口クリップの部分はリミットスイッチです。
これに引っ掛かるとアームの移動が止まるようにしていますが、まだ位置の調整中です。
今後はさらにもう少し使い勝手を上げたいと思います。。
ワンポイントアームにリニアトラッキングは最強の組み合わせだと思います。
以上、ピュアストレートアームの制作、ページ8でした。
(リニアトラッキングアームその4というかハイブリッドアームの制作、ページ4)
このページの文章、写真、図面、データ等を他に流用しないで下さい。
内容のみお使い下さい。


 前のページへ
前のページへ 次のページへ
次のページへ