ESAの彗星探査機「フィラエ」が電力喪失、スリープモードに移行
探査機にとって電力は命です。 フィラエは太陽光パネルに光が当たれば、復活の可能性がありますが、電力源としてバッテリーしか持たないハウスローバーは、それを消費してしまえば、活動できなくなります。 少しでも長くバッテリーを持続させるための制御に利用する計画で、RTCを搭載しました。

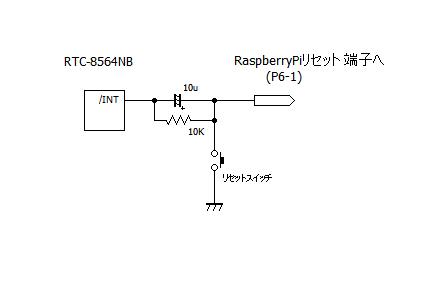
RTC-8564NBは、分、時、日、曜日を指定できるアラームと0~255秒(または分)を設定できるタイマーを内蔵しています。 その出力としてINT端子がLowレベルとなるため、Raspberry Piのリセット端子と接続することで、シャットダウン状態のシステムを起動することができます。
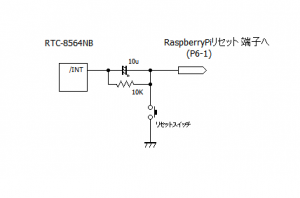
RTCのINT端子部分の配線

P6の1番ピンへ接続
I2C接続後、ハードウェアクロックデバイスとして登録します。
/etc/modules-load.d/rasberrypi.conf へ
rtc-pcf8563 を、追加
echo pcf8563 0x51 > /sys/class/i2c-adapter/i2c-1/new_device を、実行する。
これで、hwclockコマンドが使用できるようになります。
ところが、システムモジュールとして登録すると、I2Cコマンドで直接操作ができなくなります。 (pythonでは可能なようですが…)
今回は、アラーム設定を直接操作したいので、システムモジュールには登録しません。 (システムモジュールとして登録されていて、一時的に外す場合は modprobe -r rtc-pcf8563 を実行)
PHPで、RTCを設定するスクリプトを作成しました。
<?php
//RTC SET v1.1 2015.1.11 spacelab
//ハードウェアクロックとして設定されている場合は
//タイムゾーンはUTCが使用されています。
//本スクリプトはJSTとして動作しますので、事前に
//時刻設定を行って下さい。
date_default_timezone_set('Asia/Tokyo');
setlocale(LC_ALL,"ja_JP.UTF-8");
$i2cadd = 0x51; //デバイススレーブアドレス
$msk3 = 0x07;
$msk5 = 0x1f;
$msk7 = 0x3f;
$msk8 = 0x7f;
$bit2 = 0x02;
if($argv[1]){ //パラメータチェック
$sw = $argv[1];
}else{
$sw = "-d";
}
switch ($sw){
case "-d":
//RTC時刻の取得
//レジスタの読み込み
$r_sec = hexdec(exec("i2cget -y 1 $i2cadd 0x02"));
$r_min = hexdec(exec("i2cget -y 1 $i2cadd 0x03"));
$r_hou = hexdec(exec("i2cget -y 1 $i2cadd 0x04"));
$r_day = hexdec(exec("i2cget -y 1 $i2cadd 0x05"));
//$r_wek = exec("i2cget -y 1 0x51 0x06");
$r_mon = hexdec(exec("i2cget -y 1 $i2cadd 0x07"));
$r_yea = substr(exec("i2cget -y 1 $i2cadd 0x08"),2) + 2000;
//不要ビットをマスク
$r_sec = dechex($r_sec & $msk8);
$r_min = dechex($r_min & $msk8);
$r_hou = dechex($r_hou & $msk7);
$r_day = dechex($r_day & $msk7);
$r_mon = dechex($r_mon & $msk5);
$timestamp = mktime($r_hou,$r_min,$r_sec,$r_mon,$r_day,$r_yea,0);
echo strftime("%c\n",$timestamp);
break;
case "-s":
//RTC時刻をシステムタイマーと同期
$r_yea = date('y');
$r_mon = date('m');
$r_day = date('d');
$r_wek = date('w');
$r_hou = date('H');
$r_min = date('i');
$r_sec = date('s');
exec("i2cset -y 1 $i2cadd 0x08 0x".$r_yea);
exec("i2cset -y 1 $i2cadd 0x07 0x".$r_mon);
exec("i2cset -y 1 $i2cadd 0x06 0x".$r_wek);
exec("i2cset -y 1 $i2cadd 0x05 0x".$r_day);
exec("i2cset -y 1 $i2cadd 0x04 0x".$r_hou);
exec("i2cset -y 1 $i2cadd 0x03 0x".$r_min);
exec("i2cset -y 1 $i2cadd 0x02 0x".$r_sec);
$timestamp = mktime($r_hou,$r_min,$r_sec,$r_mon,$r_day,$r_yea,0);
echo strftime("%c\n",$timestamp);
break;
case "-w":
//RTCをシステム時刻に設定
//レジスタの読み込み
$r_sec = hexdec(exec("i2cget -y 1 $i2cadd 0x02"));
$r_min = hexdec(exec("i2cget -y 1 $i2cadd 0x03"));
$r_hou = hexdec(exec("i2cget -y 1 $i2cadd 0x04"));
$r_day = hexdec(exec("i2cget -y 1 $i2cadd 0x05"));
//$r_wek = exec("i2cget -y 1 0x51 0x06");
$r_mon = hexdec(exec("i2cget -y 1 $i2cadd 0x07"));
$r_yea = substr(exec("i2cget -y 1 $i2cadd 0x08"),2) + 2000;
//不要ビットをマスク
$r_sec = dechex($r_sec & $msk8);
$r_min = dechex($r_min & $msk8);
$r_hou = dechex($r_hou & $msk7);
$r_day = dechex($r_day & $msk7);
$r_mon = dechex($r_mon & $msk5);
$timestr = "$r_yea/$r_mon/$r_day $r_hou:$r_min:$r_sec";
exec("date --set='".$timestr."'");
echo exec("date")."\n";
break;
case "-as":
//アラーム時刻の設定
if($argv[2]){
if($argv[2] =="m"){$a_cas = "0x09";}
if($argv[2] =="h"){$a_cas = "0x0a";}
if($argv[2] =="d"){$a_cas = "0x0b";}
if($argv[2] =="w"){$a_cas = "0x0c";}
if($argv[3]){
$a_val = hexdec($argv[3]);
}else{
$a_val = 128;
}
exec("i2cset -y 1 $i2cadd $a_cas $a_val");
exec("i2cset -y 1 $i2cadd 0x01 0x02");
}else{
//アラームセット
exec("i2cset -y 1 $i2cadd 0x01 0x02");
echo "アラームセットしました\n";
}
case "-a":
//アラーム時刻の表示
$a_set = hexdec(exec("i2cget -y 1 $i2cadd 0x01"));
$a_min = hexdec(exec("i2cget -y 1 $i2cadd 0x09"));
$a_hou = hexdec(exec("i2cget -y 1 $i2cadd 0x0a"));
$a_day = hexdec(exec("i2cget -y 1 $i2cadd 0x0b"));
$a_wek = hexdec(exec("i2cget -y 1 $i2cadd 0x0c"));
if ($a_min >=128){$a_min_on = "無効 ";}else{$a_min_on = "有効 ";}
if ($a_hou >=128){$a_hou_on = "無効 ";}else{$a_hou_on = "有効 ";}
if ($a_day >=128){$a_day_on = "無効 ";}else{$a_day_on = "有効 ";}
if ($a_wek >=128){$a_wek_on = "無効 ";}else{$a_wek_on = "有効 ";}
$a_min = dechex($a_min & $msk8);
$a_hou = dechex($a_hou & $msk7);
$a_day = dechex($a_day & $msk7);
$a_wek = dechex($a_wek & $msk3);
echo "アラーム設定";
if (dechex($a_set & $bit2) == 2){echo " 有効\n";}else{echo " 無効\n";}
echo "Minuite: $a_min_on $a_min\n";
echo "Hour : $a_hou_on $a_hou\n";
echo "Day : $a_day_on $a_day\n";
echo "Week : $a_wek_on $a_wek\n";
break;
case "-ar":
//アラームリセット
exec("i2cset -y 1 $i2cadd 0x01 0x00");
echo "アラームリセットしました\n";
break;
case "-ts":
//タイマーの設定
if($argv[2]){
exec("i2cset -y 1 $i2cadd 0x0f $argv[2]");
if($argv[3]){
exec("i2cset -y 1 $i2cadd 0x0e 0x83");
}else{
exec("i2cset -y 1 $i2cadd 0x0e 0x82");
}
exec("i2cset -y 1 $i2cadd 0x01 0x01");
}else{
echo "パラメータが足りません\n";
}
case "-t":
//タイマー情報の表示
$t_cnt = hexdec(exec("i2cget -y 1 $i2cadd 0x0e"));
$t_dat = hexdec(exec("i2cget -y 1 $i2cadd 0x0f"));
echo "タイマー設定";
if ($t_cnt >=128){echo " 有効\n";}else{echo " 無効\n";}
if ($t_cnt & 1){$clock = "分";}else{$clock = "秒";}
echo "Timer: $t_dat $clock\n";
break;
case "-tr":
//タイマーリセット
exec("i2cset -y 1 $i2cadd 0x01 0x00");
exec("i2cset -y 1 $i2cadd 0x0e 0x00");
echo "タイマーリセットしました\n";
break;
case "-h":
case "-?":
print <<< EOS
使用法: rtcset.php [機能] [設定値]...
機能:
-d 現在時刻を表示する
-s RTCをシステムクロックと同期する
-w RTCの時刻をシステムクロックへ設定する
-a アラームの設定状況を表示する
-as [m,h,d,w] [値]
アラームを有効に設定する
[m,h,d,w] 分,時,日,曜日の項目を指定する
[値] を省略すると該当項目を無効にする
曜日の値:日=0 月=1 火=2 水=3 木=4 金=5 土=6
例: 10時30分に設定
-as h 10
-as m 30
-ar アラームをリセットし、無効に設定する
-t タイマーの設定状況を表示する
-ts [値] [秒,分]
タイマーを有効に設定する
[値] 0-255(秒) 単位: [初期値=秒,1=分]
-tr タイマーをリセットし、無効に設定する
-h,-? 使い方を表示
-v バージョン情報を表示
EOS;
break;
case "-v":
echo "rtcset.php version 1.1\nCopyright (C) 2015 space laboratory\n";
break;
}
?>
php rtcset.php -h で、ヘルプが表示されます。 アラームやタイマーの設定をして、シャットダウンを実行することで、指定の時刻に起動させる事ができるようになりました。
アラーム出力はRaspberry Piにリセットをかけるものですので、メインのソフトウェアで定期的にタイマーを更新するような処理を行うことで、システム異常停止の際に復帰させる、ウォッチドッグタイマーの様な使い方もできると思います。