
ロボットの移動量測定には、フォトインタラプタなどによる車輪の回転量計測や加速度センサー等によるものなどがありますが、非接触で移動量を検出する身近で安価なアレが使用できないかと思い立ち実験してみました。
これです。 ロジテック光学マウスMX510。 2、3年使い込んだ現役引退物ですので、結構古いです。
光学マウスはその性質上、マウスの底面から3ミリ程度までしか反応しないように設計されています。 そこで、センサー部に別のレンズを使用して反応距離を伸ばそうという試みです。
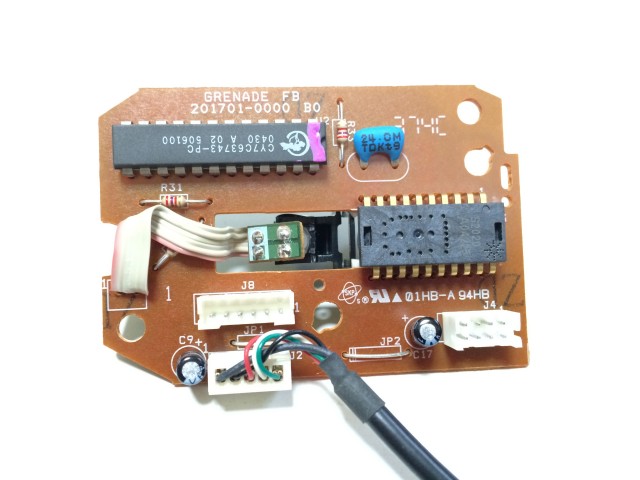

レンズと言っても適当なものがなく、古いデジカメから取り外しセンサー部に取り付け、位置や距離を試行錯誤。
なんとか、レンズ面から30ミリの距離で床面の移動を検知出来る状態になりました。
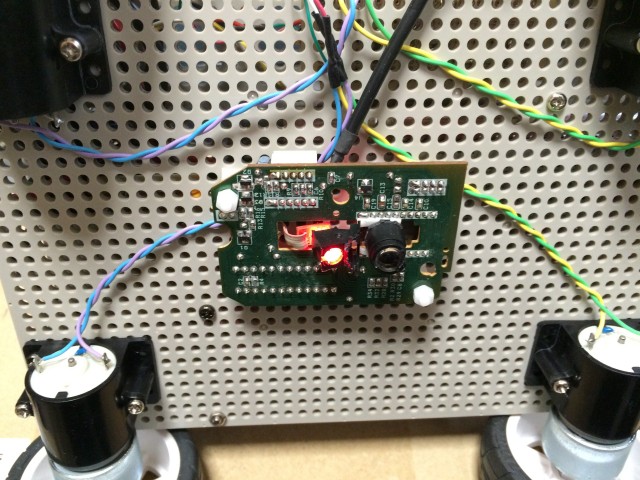
実装するとすれば、こんな感じでしょうか。
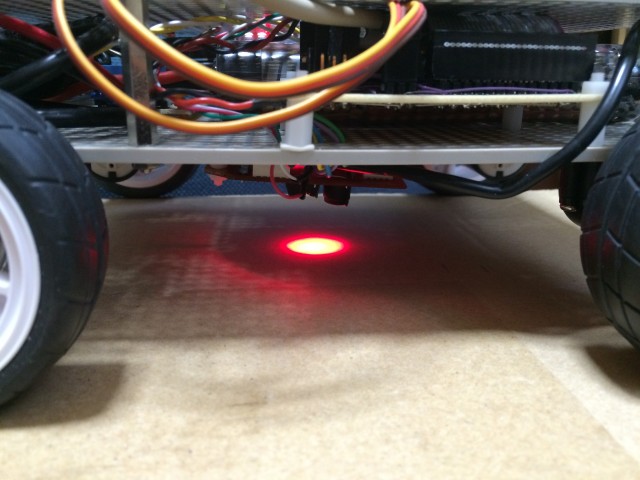
なんとか、使い物になりそうな感じですが、床面との距離には敏感で、焦点深度4ミリといったところでしょうか。 凹凸のある路面では厳しいかな…。
光源や光学系の性能次第ですね。
光学センサーを用いた移動ロボット用位置推定システムについて、東北大学の方が論文を書かれていました。
http://www.astro.mech.tohoku.ac.jp/~keiji/papers/pdf/2010-Robomec-IN-online.pdf
安価なセンサーだからといっても、移動ロボット用として信頼性を上げるのは簡単なことではなさそうです。