
遠隔操作の際、車体の向きを知ることはとても重要です。 ジャイロセンサーは相対的な向きですので、現在の方位を得るためにコンパスモジュールは搭載したいデバイスです。 また、応答速度や安定性が高ければ、旋回動作にもコンパスを使用することを検討したいと思います。

HMC6352 ディジタルコンパスモジュール
HMC6352 ディジタルコンパスモジュールは、磁気の測定値ではなく、方位として出力するデバイスですので、ホスト側の負荷も軽減できそうです。
接続はI2Cですので、4線でOKです。 電源は3.3Vを使用しました。
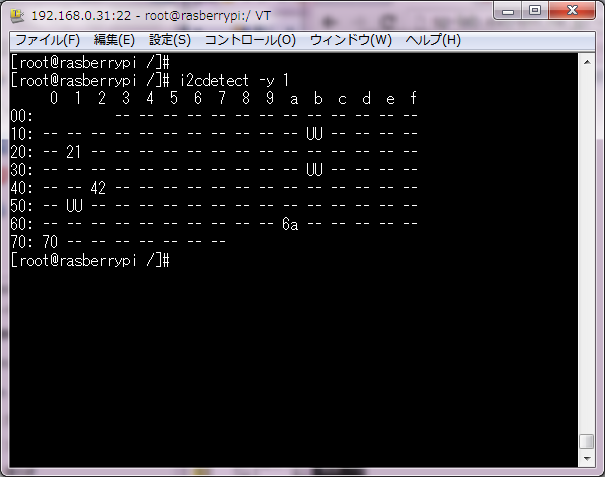
スレーブアドレスは、21hで認識しています。
HMC6352には、計測モードが3種類ありますが、デフォルトのStandbyモードで試してみます。
i2cset -y 1 0x21 0x57 //ウェイクアップ
i2cset -y 1 0x21 0x41 //読み出しコマンド”A”
i2cget -y 1 0x21 0x43 w //読み出し
あとは、コマンドA、読み出し を、繰り返す毎に数値が得られます。 PHPで、テストスクリプトを作成しました。
<?php
//HMC6352 コンパスモジュール testプログラム
exec("i2cset -y 1 0x21 0x57"); // ウェイクアップ
exec("i2cset -y 1 0x21 0x43"); //キャリブレーション開始
echo "キャリブレーションを実施して下さい。\n";
$input = fgets(STDIN,4096); //キー入力待ち
exec("i2cset -y 1 0x21 0x45"); //キャリブレーション終了
while (1){
exec("i2cset -y 1 0x21 0x41"); //読み出しコマンド"A"
$cmp = exec("i2cget -y 1 0x21 0x43 w"); // 読み込み
$cmp = hexdec(substr($cmp,-2).substr($cmp,2,2)) / 10;
printf("方位 %.1f 度\n", $cmp);
sleep(1);
}
?>
キャリブレーション実施待ちのフローは、はじめはなっかたのですが、キャリブレーションを行わないと数値が全く安定しません。 データシートには、2回転を20秒以上実施とあります。 実際には、1回転行えば、ほぼ、安定した計測値が得られますが、サーボや走行用モーターの動作中は数値が不安定になります。
モジュールの取り付け位置を、サーボやモーターから、離す必要がありますね。 絶対方位の取得は魅力なのですが、現状ではモーター動作時に旋回制御センサーとしての役割を担うことは厳しそうです。