電子工作で使用する、定電圧回路にはリニアレギュレータが定番です。 できるだけ効率のよいものを選定するようにはしますが、この手のパーツはストックがあったり、使い回しをしたりで、古い型のものを使う場合も少なくありません。
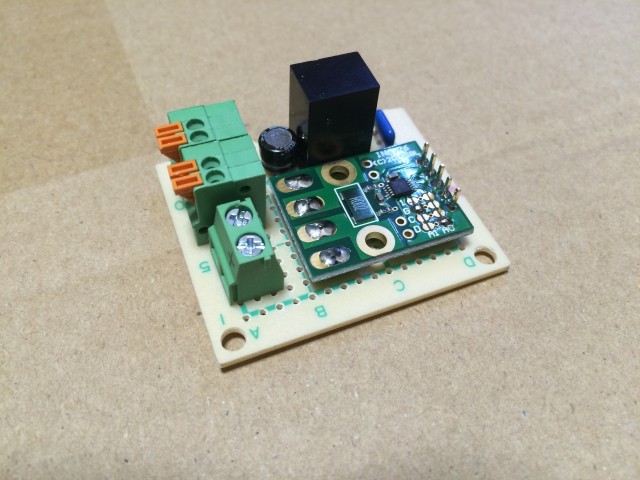
DC-DCコンバータを使った電源基板
ハウスローバーの電源レギュレータも少し(?)旧型のレギュレータを使っていましたが、ヒートシンクが触れなくなるほどの高温に…。 小型のバッテリーで、触れられないほどの熱を出し続けるのは相当な電力を無駄にしていると感じ、DC-DCコンバータに入れ替えてみることにしました。

スーパー3端子レギュレータ V7805-1000
スーパー3端子レギュレータ V7805-1000。 秋月電子で630円。 低損失リニアレギュレータなら100円で入手できますから、高価なパーツですね。
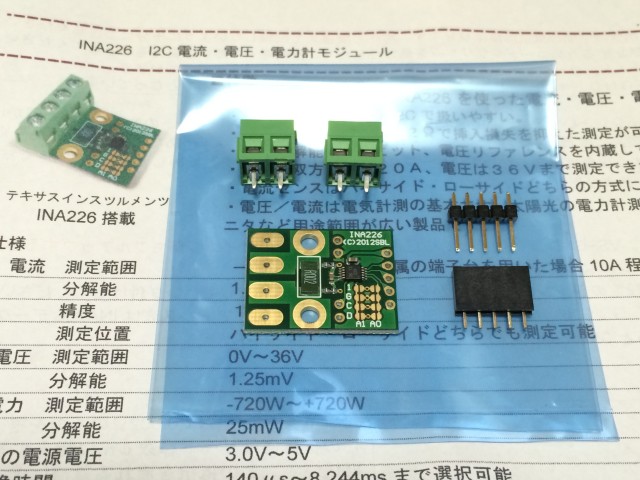
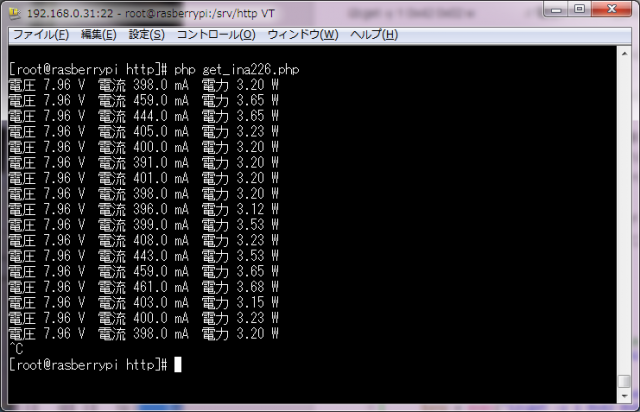
「バッテリーのコンディションを監視する」で検証したINA226モジュールも含めた、電源基板を作成。 早速、効果の程を実測です。
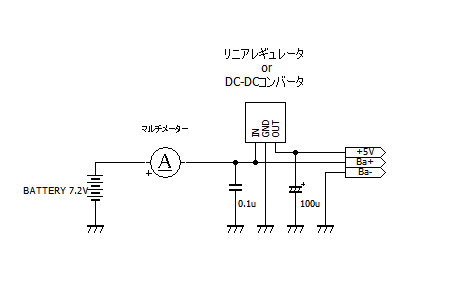
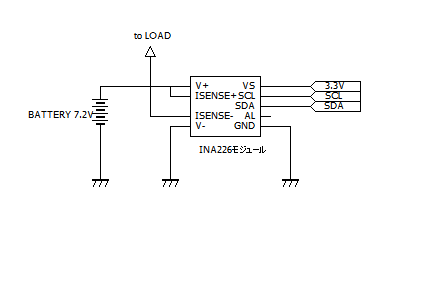
電流測定回路
バッテリー側にマルチメーターを繋ぎ、負荷はRaspberry Pi、webカメラ、無線LANアダプタ等、通常接続しているハードウェアです。
| アイドル時 (起動3分後) | 高負荷時 (ストリーミング使用) | シャットダウン時 (CPU停止) |
|
|---|---|---|---|
| リニアレギュレータ LM2940-5 | 570mA | 680mA | 510mA |
| DC-DCコンバータ V7805-1000 | 410mA | 470mA | 350mA |
年季の入った古いマルチメーターでは、その差が計測できないのでは?と思っていましたが、予想を超える数値でした。 概ね、30%程度の省エネルギー化です。 発熱もほとんど感じられず、稼働時間も伸び、 630円は高くない買い物でした。