
ハウスローバーのブロック図です。
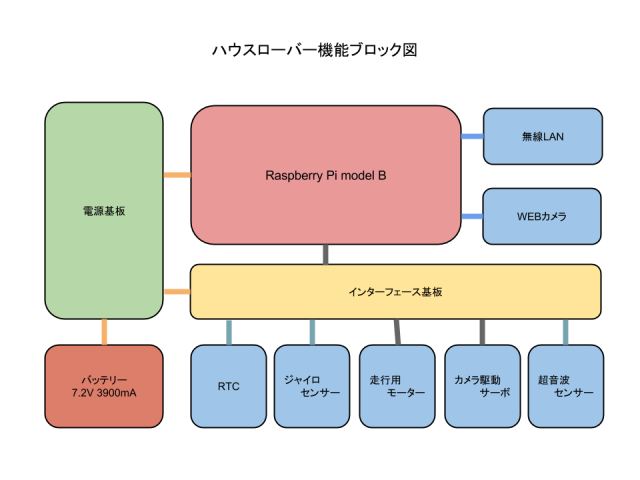
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC そしてサーボ用のコネクタなどを搭載しています。
Raspberry Piとの接続は26Pのフラットケーブルを使用しました。
また、電源レギュレータのみ電源基板として別にしました。電源構成はラジコン用バッテリー7.2Vからレギュレータを通し5Vをrasberry piへ供給しています。インターフェース基板へはrasberry piから5V、3.3Vを、また、モーター駆動用にバッテリーから7.2Vを供給しています。レギュレータは非常に高温となり、エネルギーを無駄に消費している気がしてならないので、DC-DCコンバーターを試してみたいと思っています。
回路図です。
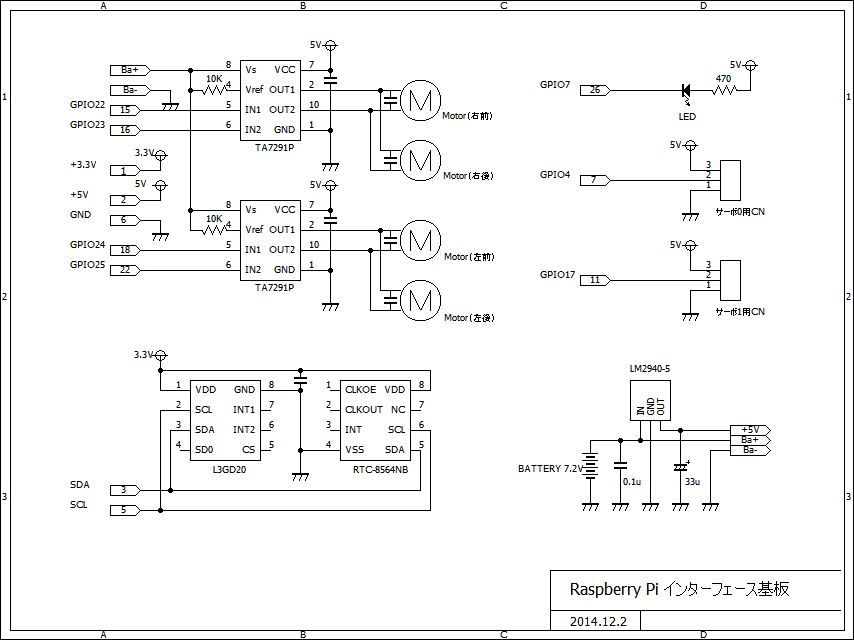
モータードライバーにはオーソドックスなTA7291Pを使用。モーター駆動の工作には、いつもこの素子を使っている気がします。息の長い部品です。
RTCは、システムのハードウェアクロックデバイスとして設定しています。 今後、バックアップバッテリーを接続し、アラーム出力を使ってRaspberry Piを起動させる機能を予定しています。