webコントロール画面は、MJPG-Streamerのストリーミング映像を中心に構成しています。
機能面では、Motionの方が充実しているのですが、動作の軽快なMJPG-Streamerを利用しています。
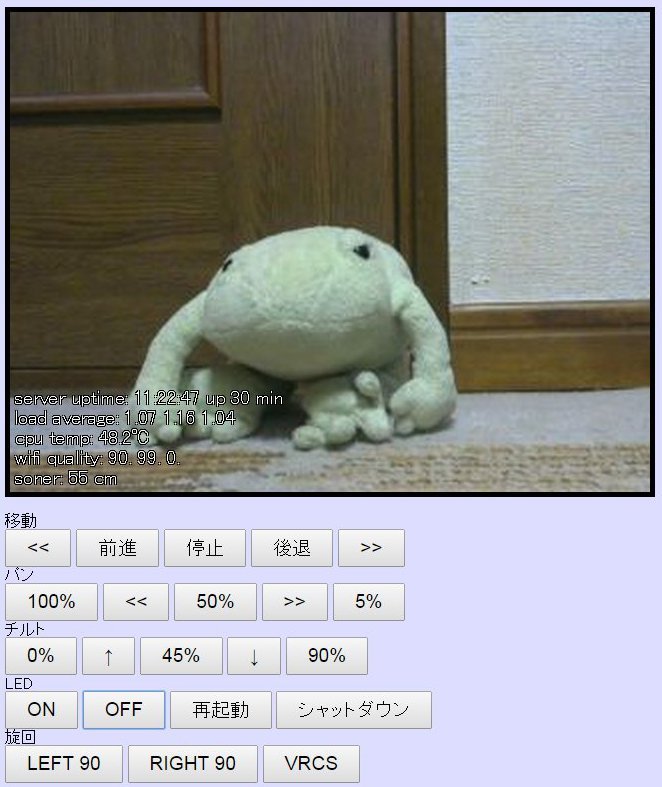
カメラ映像にはjavascriptにより、情報を重ね合わせ表示しています。
起動時刻、CPU負荷、CPU温度、無線品質、距離センサーのデータを表示しています。
今後、バッテリー電圧や進行方向・走行距離などの表示を加えたいと思います。
試作レベルの為、操作性やデザインなどを考慮していなかったので、現在、新バージョンを製作中です。